在人工智能和机器人技术飞速发展的今天,开源项目为研究者和开发者提供了宝贵的资源和工具。ToddlerBot,由斯坦福大学开发的开源机器学习与人形机器人平台,正是这样一个令人兴奋的项目。它不仅为高效收集大规模、高质量的训练数据而设计,还具备强大的运动和操作能力,适用于广泛的研究和应用场景。本文将详细介绍ToddlerBot的功能、技术原理及其应用场景,帮助你全面了解这一开源平台的优势。
ToddlerBot 是什么?
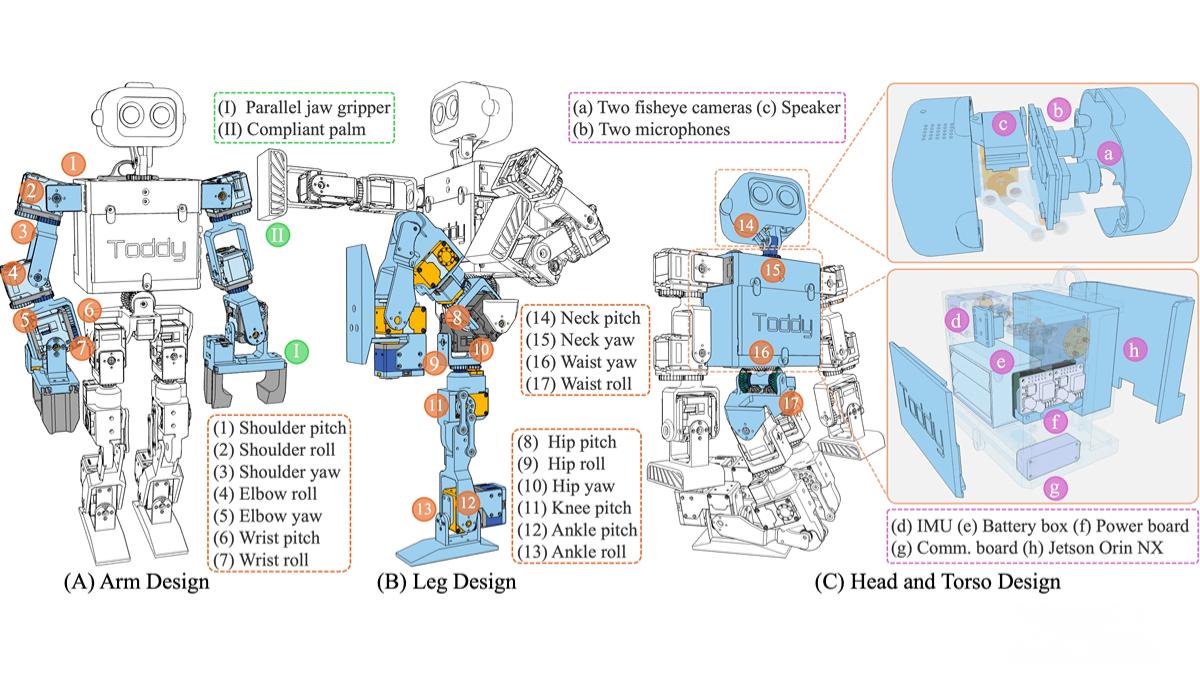
ToddlerBot 是斯坦福大学开源的机器学习与人形机器人平台,专注于高效收集高质量的训练数据。它具备30个主动自由度,采用Dynamixel电机,总成本控制在6000美元以内,性价比极高。通过数字孪生技术和零点校准,ToddlerBot实现了模拟到现实的零样本转移,支持远程操作设备高效收集现实世界数据。其开源设计和详细组装手册使其易于复制和维护,适合广泛的研究应用。
ToddlerBot 的主要功能
-
高效数据收集 ToddlerBot能够同时在模拟环境和现实世界中收集高质量的训练数据,支持大规模机器学习任务。这种能力使其成为研究者和开发者进行数据驱动研究的理想工具。
-
全身运动与操作 ToddlerBot具备30个主动自由度,能够执行复杂的全身运动和操作任务,如步行、推-ups、拉-ups、双臂操作和全身操作。其灵活的运动能力使其在多种场景中表现出色。
-
零样本模拟到现实转移 基于高保真数字孪生技术和电机系统识别,ToddlerBot能够实现从模拟到现实的无缝策略转移,无需额外的样本数据,大大提高了研究效率。
-
远程操作与数据收集 ToddlerBot配备直观的远程设备,支持基于人类演示快速收集现实世界数据,可用于学习运动技能。通过力敏电阻和手持游戏电脑(如Steam Deck或ROG Ally X),操作员可以直观地指导机器人完成复杂任务。
-
人机交互与协作 ToddlerBot支持多机器人协作任务,如共同完成房间清理等复杂场景。这种协作能力使其在家庭、教育和工业等领域的应用潜力巨大。
ToddlerBot 的技术原理
-
数字孪生与零点校准
-
数字孪生:基于精确的物理模型和系统识别技术,创建高保真的模拟模型,确保模拟数据与现实世界的一致性。
-
零点校准:使用3D打印的校准设备,快速校准机器人的零点位置,确保运动控制的准确性。
-
电机系统识别(SysID):通过命令电机跟踪扫频信号,收集位置跟踪数据,拟合执行模型,确保动态参数的准确性,使机器人在模拟和现实世界中具有相同的运动特性。
-
-
远程操作技术 ToddlerBot使用第二个上肢作为远程操作设备,基于力敏电阻和手持游戏电脑(如Steam Deck或ROG Ally X)控制机器人的运动。这种设计支持人类操作员直观地指导机器人完成复杂任务。
-
强化学习与模仿学习
-
强化学习(RL):基于MuJoCo和PPO算法训练步行和转向策略,输出关节位置设定值,实现高效的运动控制。
-
模仿学习:通过远程操作收集现实世界数据,训练扩散策略(Diffusion Policy),实现复杂的操作任务。
-
ToddlerBot 的应用场景
-
家庭玩具整理 两个机器人协作,一个负责捡玩具,另一个负责推车,共同完成玩具收纳。这种场景展示了ToddlerBot在家庭环境中的实际应用潜力。
-
教育编程平台 学生可以通过编程让ToddlerBot完成步行、推-ups等任务,使其成为教育领域的理想工具,帮助学生学习机器人控制和编程。
-
实验室运动技能研究 通过强化学习训练,ToddlerBot可以完成跳跃、攀爬等高难度动作,为运动技能研究提供了强大的实验平台。
-
家庭陪伴机器人 ToddlerBot可以与儿童互动,完成拼图或运动游戏,成为家庭陪伴机器人的重要候选。
-
工业零部件操作 ToddlerBot能够操作小型电子元件或机械零件,适用于工业自动化场景。
ToddlerBot 的项目资源
-
GitHub仓库:https://github.com/hshi74/toddlerbot
-
arXiv技术论文:https://arxiv.org/pdf/2502.00893
ToddlerBot作为斯坦福大学开源的机器学习与人形机器人平台,凭借其高效的数据收集能力、强大的运动操作性能以及零样本模拟到现实转移技术,正在为机器人研究和应用领域注入新的活力。无论是研究人员、开发者还是教育工作者,ToddlerBot都提供了丰富的资源和可能性。如果你对机器人技术感兴趣,不妨访问其官网和GitHub仓库,深入了解这一开源项目的潜力和价值。